
Have you ever wondered about the technology behind the precise movements of robotic arms in factories, the accurate positioning of antennas tracking satellites, or the smooth operation of automated machinery? The answer often lies in servo motors, sophisticated devices that enable controlled and accurate motion in a wide array of applications.
Building on our previous exploration of stepper motors, this article will delve into the world of servo motors. We’ll uncover what exactly a servo motor is, how it operates, its different types, and the diverse applications where its precision control is indispensable. Let’s embark on this journey to understand the core of servo motor technology.
Servo Motor Basics: Components and Closed-Loop Operation
At its heart, a servo motor is a self-contained rotary actuator that allows for precise control of angular or linear position, velocity, and acceleration. Unlike standard motors that simply rotate continuously when powered, servo motors are designed for accuracy and responsiveness within a closed-loop feedback system.
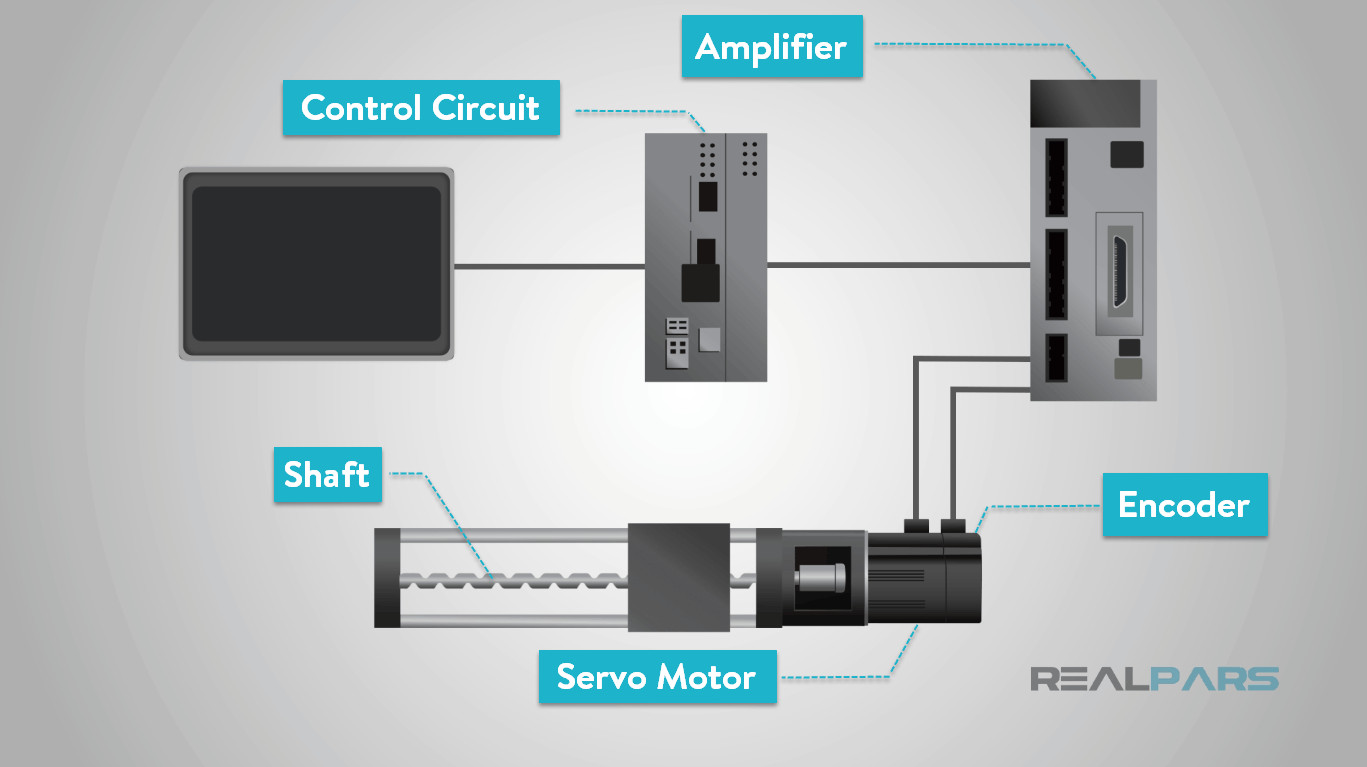
A servo motor system is comprised of several key components working in concert:
- Servo Motor: The motor itself, which can be either AC or DC, provides the rotational force.
- Control Circuit: This is the “brain” of the servo motor, receiving command signals and orchestrating the motor’s movement.
- Position Sensor (Encoder or Resolver): Crucially, servo motors incorporate a sensor, typically an encoder or resolver, to provide real-time feedback on the motor’s position. This feedback is essential for closed-loop control.
- Shaft: The output shaft is what rotates and delivers the controlled motion.
- Drive Gears (Optional): Gear systems can be integrated to modify the motor’s torque and speed, adapting it to specific application needs.
- Amplifier: Boosts the control signal to provide sufficient power to drive the motor.
- Potentiometer (in some simpler servos): In basic servo mechanisms, a potentiometer might be used as a simpler position feedback sensor, though encoders and resolvers offer higher accuracy in more advanced systems.
 Motion Control System
Motion Control System
The defining characteristic of a servo motor is its closed-loop operation. This means the system continuously monitors its output (position, speed) and adjusts the motor’s input to match the desired command. Imagine it like this: you tell the servo motor to rotate to a specific angle. The control circuit sends a signal, the motor starts moving, and the encoder constantly reports back the current position. The control circuit compares the actual position with the desired position and makes corrections until they align.
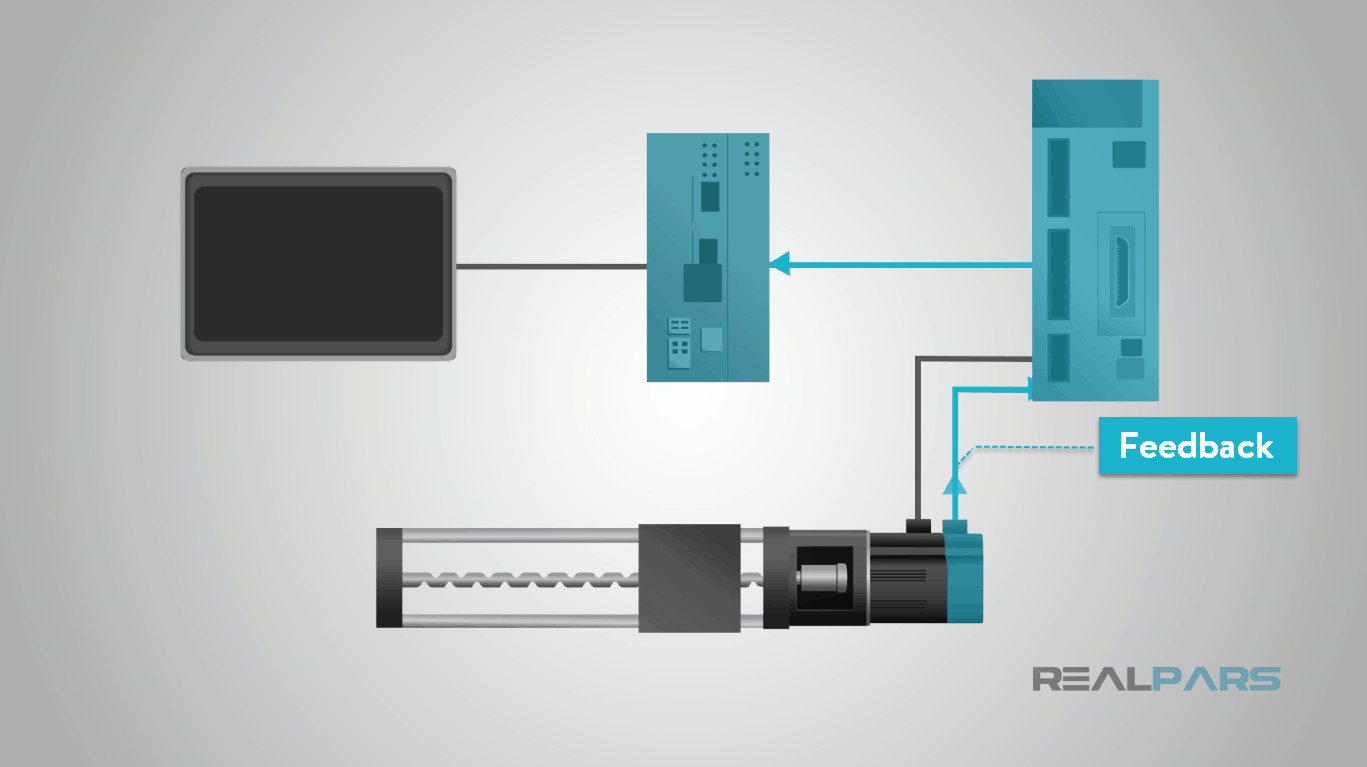 Servo Motor Feedback
Servo Motor Feedback
This feedback loop is what enables servo motors to achieve exceptional precision. The control signal, whether analog or digital, dictates the intended position.
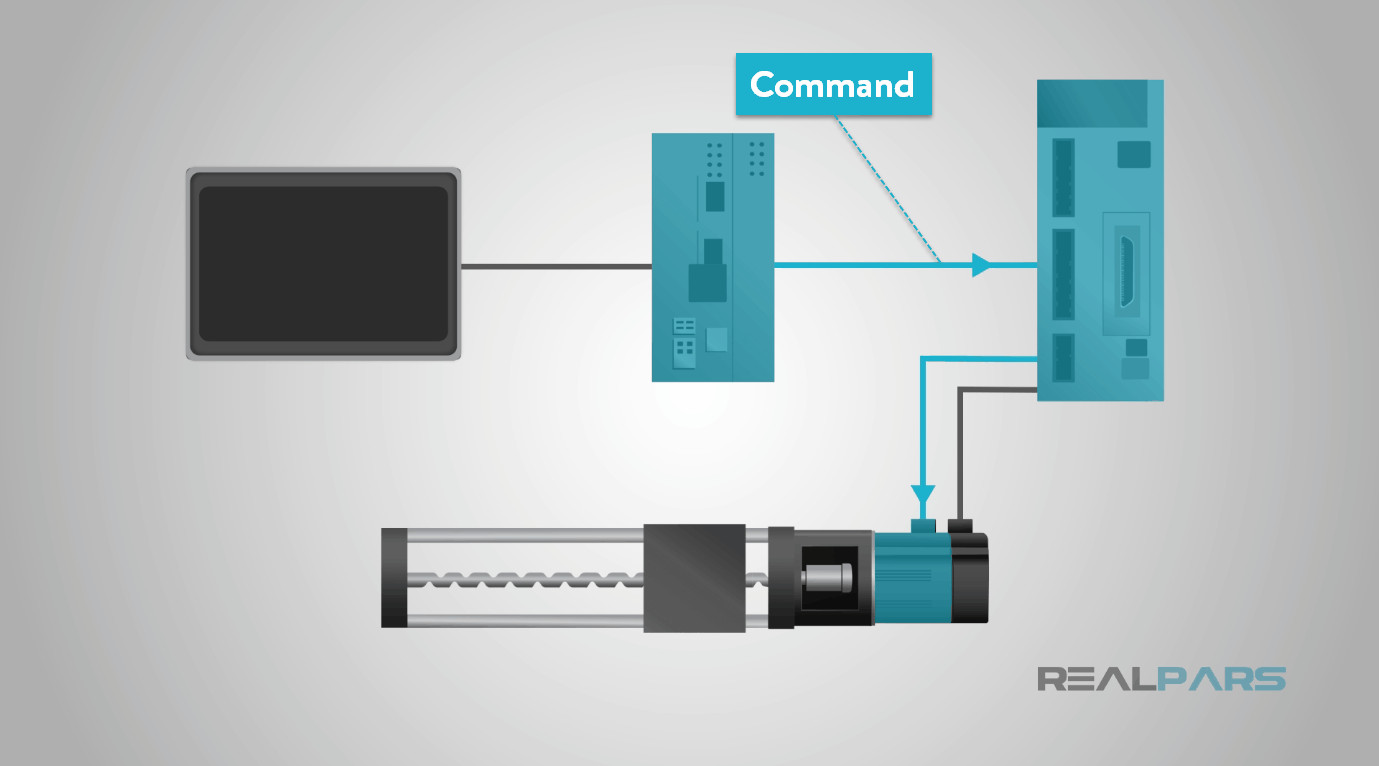 Servo Motor Control Command
Servo Motor Control Command
Encoders, acting as sophisticated sensors, are integral to providing accurate speed and position feedback. These are usually integrated directly into the motor housing, often alongside gear systems for optimized performance.
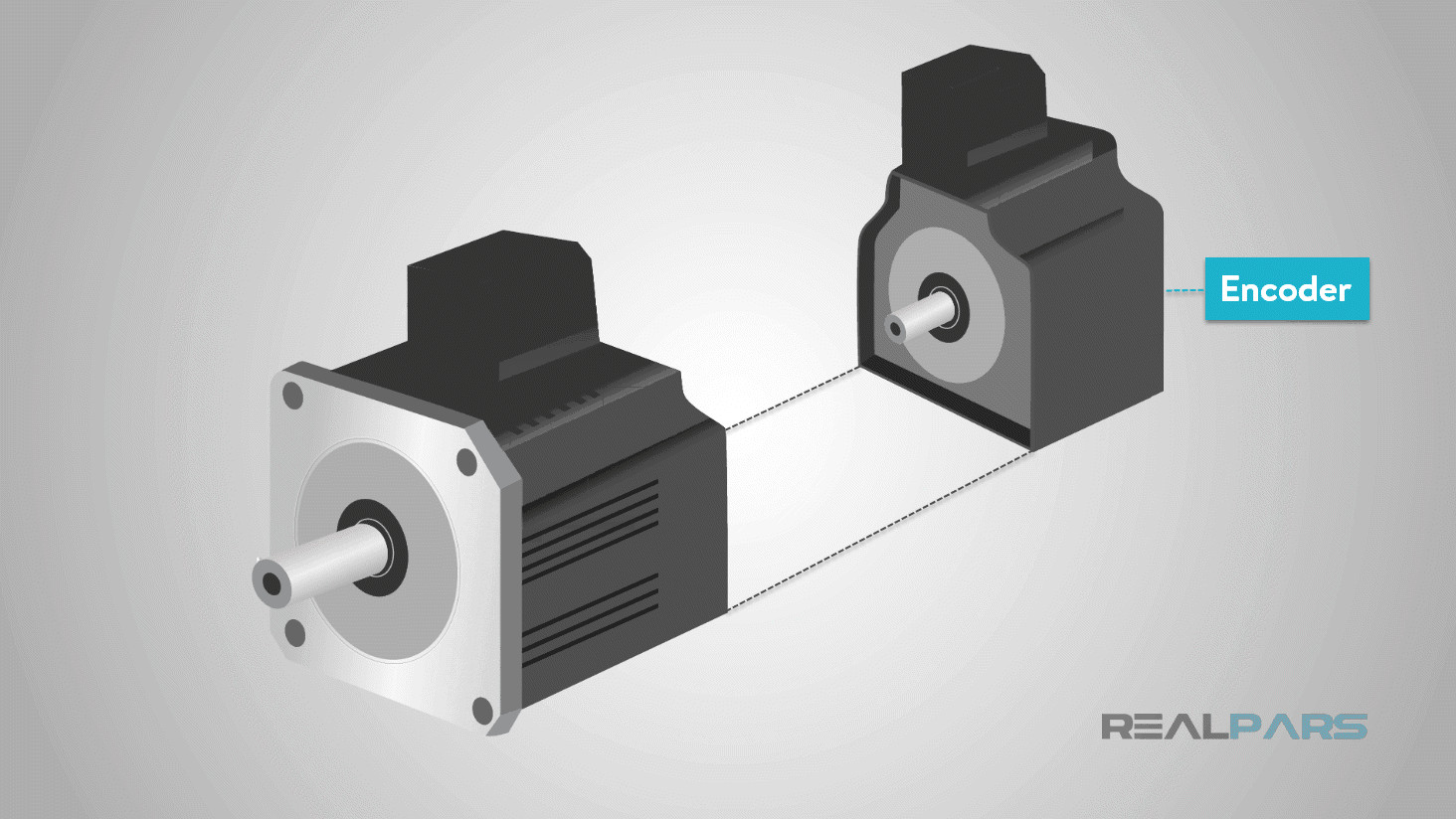 Servo Motor Encoder
Servo Motor Encoder
Types of Servo Motors: A Detailed Classification
Servo motors are categorized based on several factors, primarily their current type (AC or DC), commutation method (brushed or brushless), and rotor field type (synchronous or asynchronous). Understanding these classifications is crucial for selecting the right servo motor for a specific application.
Based on Current Type: AC vs. DC Servo Motors
The most fundamental classification distinguishes between AC and DC servo motors, based on the type of electrical current they utilize.
 Types of Servo Motors
Types of Servo Motors
-
DC Servo Motors: In DC motors, speed control is inherently linked to the supply voltage. With a constant load, the speed is directly proportional to the voltage applied. This straightforward speed control is a key characteristic of DC servo motors.
 Servo Motor Speed
Servo Motor Speed -
AC Servo Motors: In contrast, the speed of an AC motor is dictated by the frequency of the applied voltage and the number of magnetic poles in its design. AC servo motors generally excel in applications demanding higher current and are frequently chosen for demanding industrial settings like robotics and automated manufacturing lines where repetitive, high-precision movements are paramount.
Based on Commutation: Brushed vs. Brushless Servo Motors
Another crucial distinction is whether a servo motor is brushed or brushless, referring to the method of electrical commutation within the motor.
 Brushed or brushless Servo Motors
Brushed or brushless Servo Motors
-
Brushed Servo Motors: These motors employ mechanical commutation using brushes and a commutator. Brushes are conductive components that make physical contact with the commutator, a rotating electrical switch.
 Brushe in Servo Motors
Brushe in Servo MotorsWhile brushed motors are typically less expensive and simpler to operate, they have drawbacks. The brushes wear down over time, requiring maintenance, and they can generate electrical noise. Permanent magnet DC motors are common brushed DC servo motors due to their simplicity.
 permanent magnet DC motor
permanent magnet DC motor -
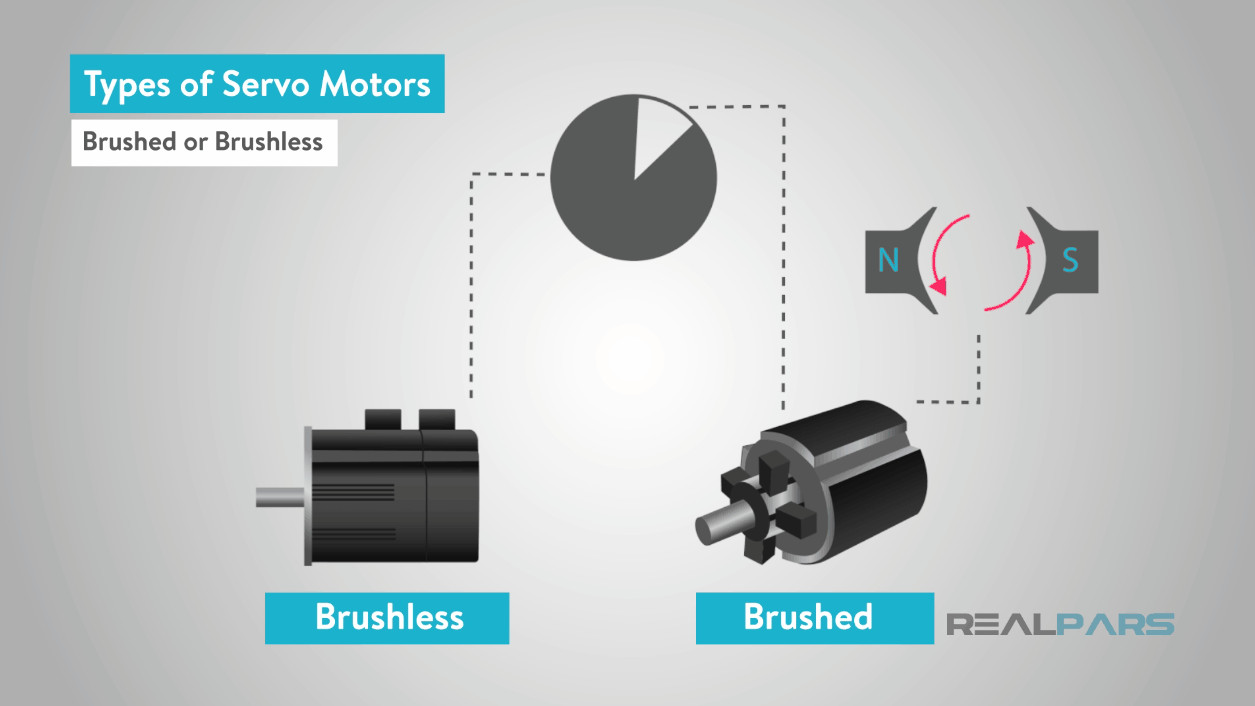
Brushless Servo Motors: Brushless designs eliminate the brushes and commutator, opting for electronic commutation instead. This is typically achieved with Hall effect sensors or encoders that detect the rotor’s position and electronically switch the current in the motor windings.
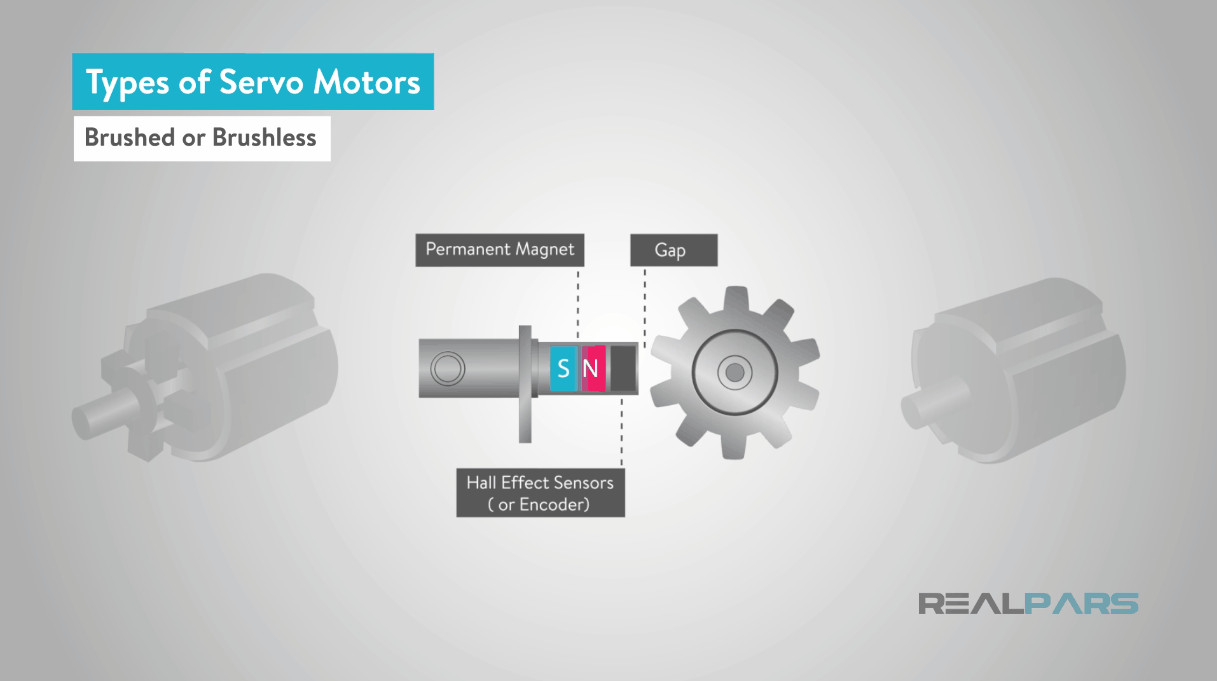 Hall effect sensors in Servo Motor
Hall effect sensors in Servo MotorBrushless servo motors offer significant advantages: they are more reliable, have higher efficiency, produce less noise, and require less maintenance due to the absence of brush wear. Although most servo systems favor AC brushless motors, brushed permanent magnet motors find use in applications where cost-effectiveness is a primary concern. Universal motors, capable of running on both AC and DC power, represent a less common brushed AC motor type.
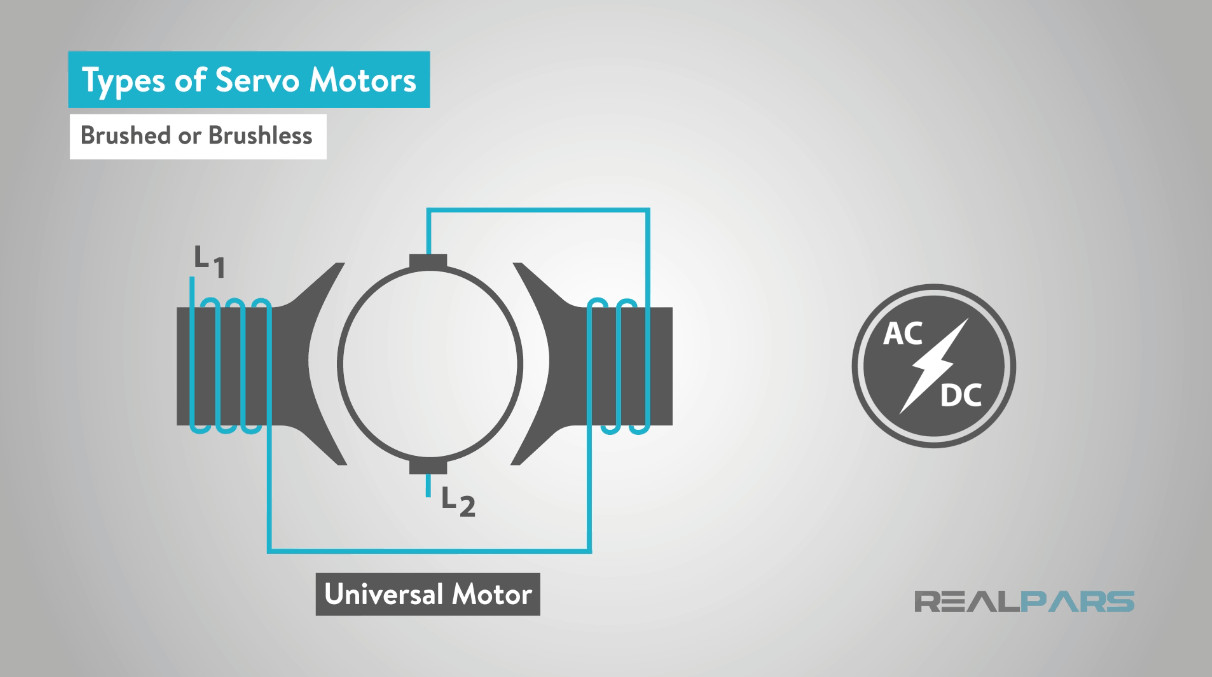 Universal Motors
Universal Motors
Based on Rotating Field: Synchronous vs. Asynchronous Servo Motors
Finally, AC servo motors can be further categorized by the relationship between their rotor’s rotation and the stator’s rotating magnetic field: synchronous or asynchronous.
 Synchronous or Asynchronous Srvo Motors
Synchronous or Asynchronous Srvo Motors
-
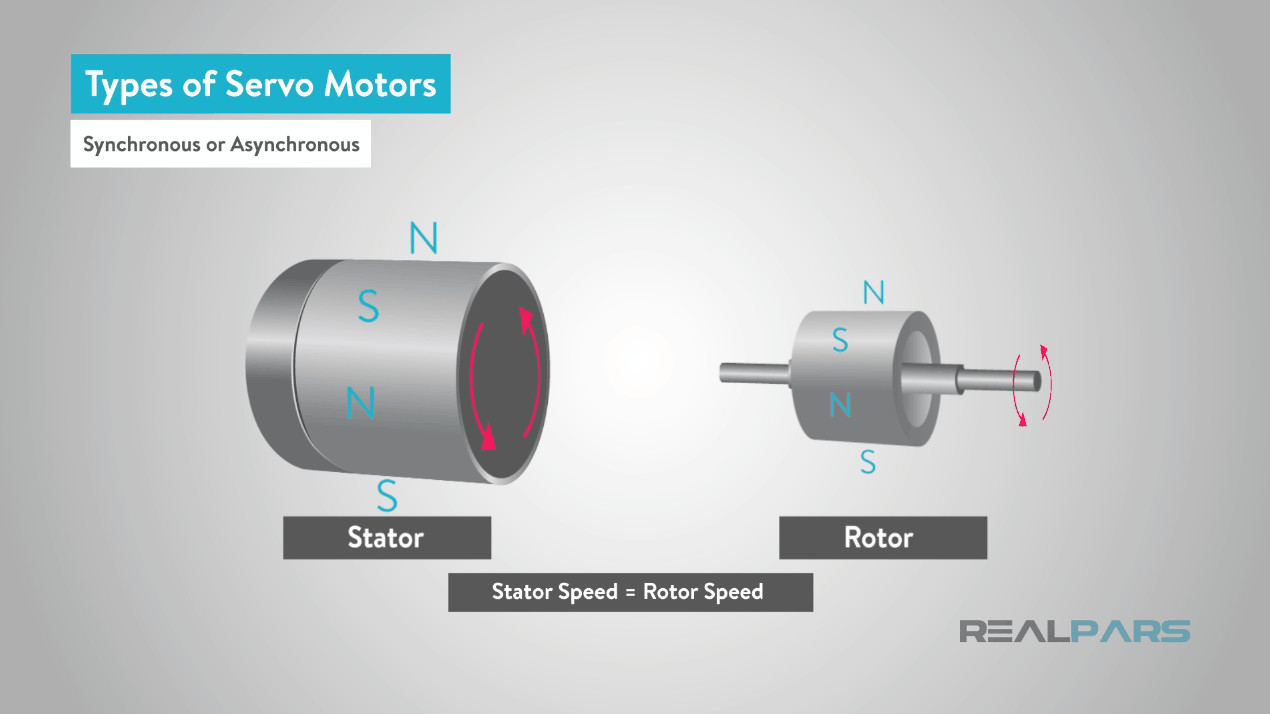
Synchronous Servo Motors: In synchronous motors, the rotor rotates at the same speed as the stator’s rotating magnetic field. This speed, known as the synchronous speed, is determined by the frequency of the supply voltage and the motor’s number of magnetic poles. Synchronous AC servo motors often utilize permanent magnets in their rotor.
-
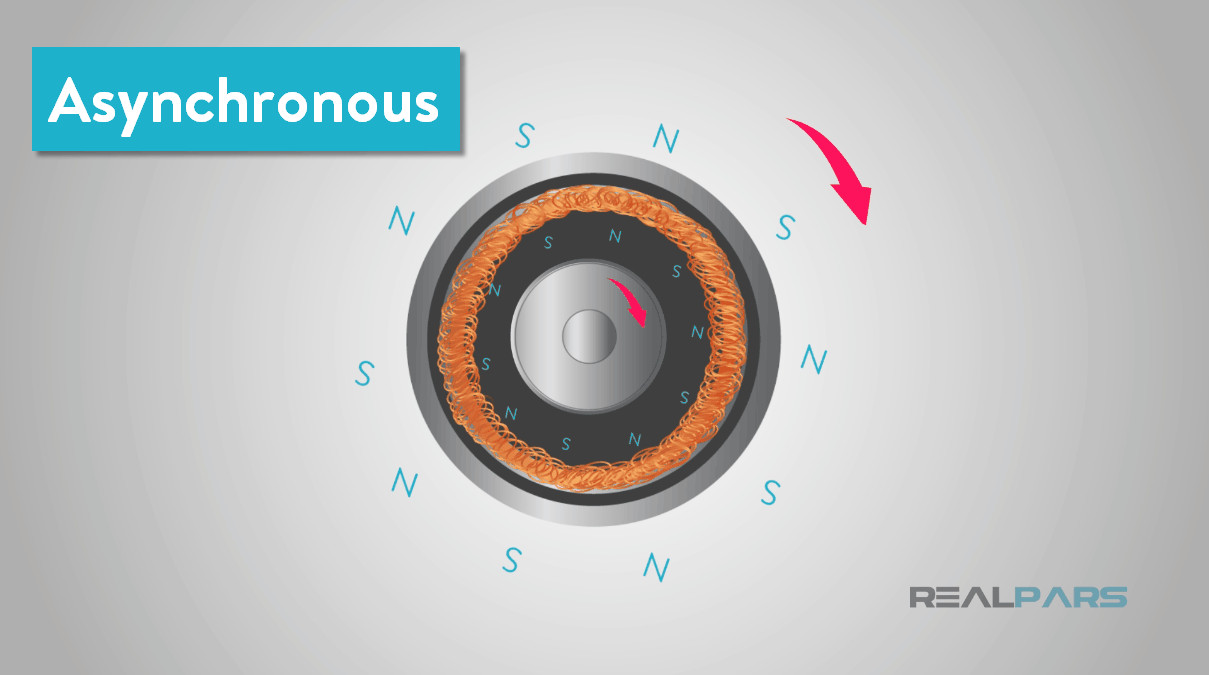
Asynchronous Servo Motors (Induction Motors): Also known as induction motors, asynchronous motors have rotors that rotate slightly slower than the stator’s magnetic field. This difference in speed is necessary for inducing current in the rotor and generating torque.
 asynchronous motor
asynchronous motorWhile synchronous motors maintain precise synchronization, asynchronous motors offer speed control flexibility through methods like pole changing and frequency variation.
Working Principles: How Servo Motors Function
The operational principles differ slightly between DC and AC servo motors.
DC Servo Motor Working Principles
DC servo motor operation hinges on four main components: a DC motor, a position sensor, a gear assembly, and a control circuit. The desired motor speed is directly related to the applied voltage. To regulate speed, a potentiometer generates a voltage input to an error amplifier.
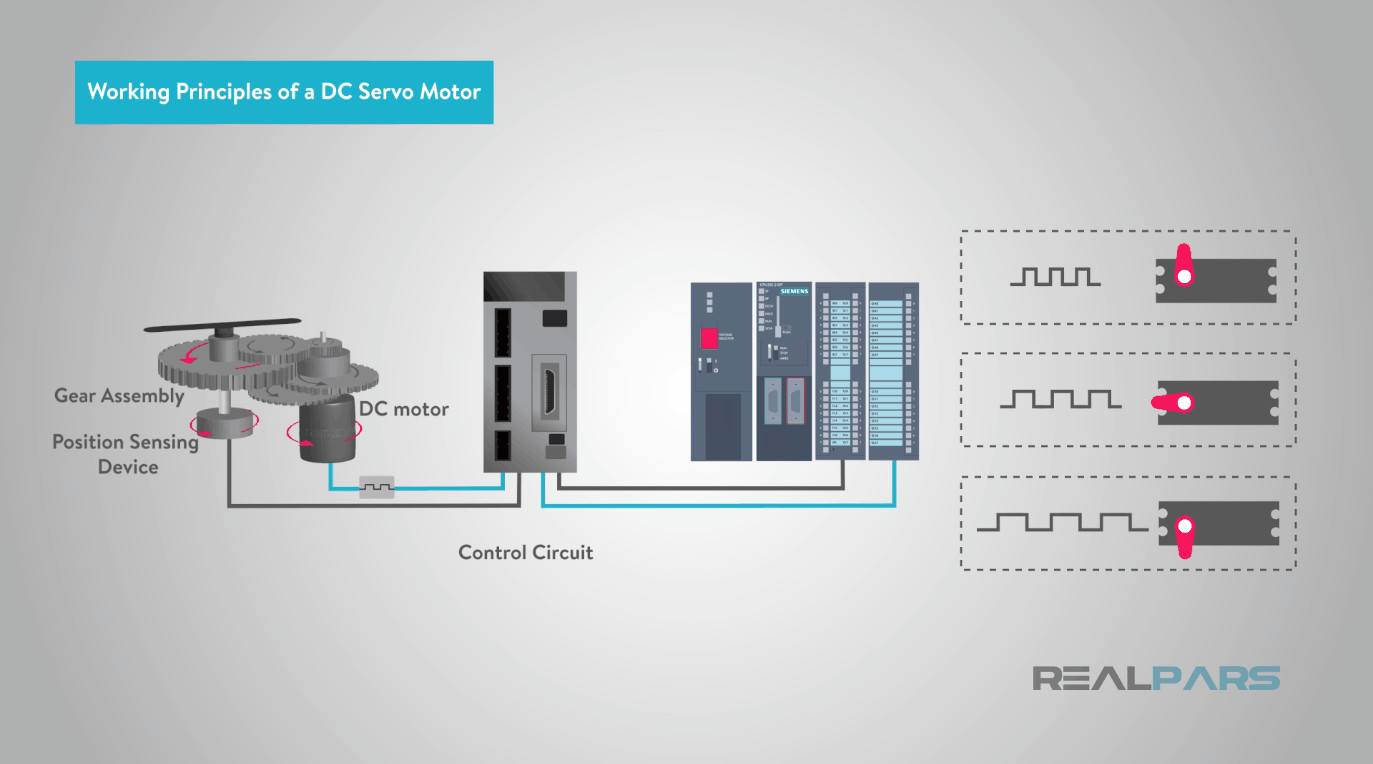 Servo Motor Control Circuit
Servo Motor Control Circuit
In certain setups, control pulses create a DC reference voltage, representing the target position or speed, fed to a pulse width voltage converter. Pulse length determines the voltage applied to the error amplifier, influencing the desired speed or position. For advanced digital control, Programmable Logic Controllers (PLCs) or dedicated motion controllers generate duty cycle-based pulses for precise command.
Feedback is crucial. A potentiometer, connected via gears to the motor shaft, acts as a position sensor, producing a voltage reflecting the shaft’s angular position. This feedback voltage is input to an error comparator amplifier.
The amplifier compares the feedback voltage (current position) with the desired position, generating an error voltage—positive or negative. This error voltage is applied to the motor armature. Larger errors result in higher armature voltage. As long as an error persists, the amplifier powers the armature, driving the motor. The motor rotates until the error diminishes to zero. A negative error reverses the armature voltage, reversing the motor’s direction.
AC Servo Motor Working Principles
AC servo motors come in synchronous and asynchronous (induction) types, each with distinct operational principles.
Synchronous AC Servo Motors: These comprise a stator and a rotor. The stator has a cylindrical frame and core, with armature coils connected to a power supply.
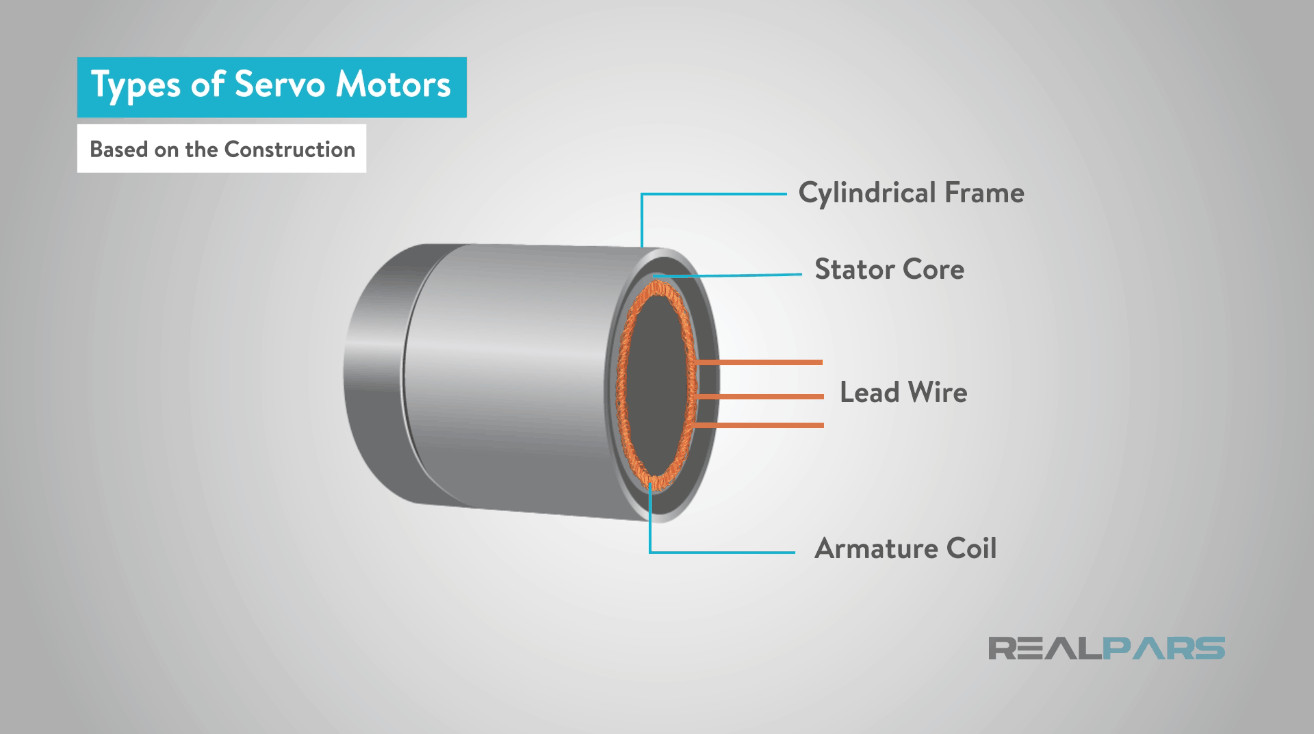 synchronous AC servo motor
synchronous AC servo motor
The rotor features a permanent magnet, unlike asynchronous types where rotor current is electromagnetically induced. When the stator field is energized, the rotor follows the rotating magnetic field at the same, synchronous speed. The permanent magnet rotor eliminates the need for rotor current, enhancing efficiency. An encoder provides rotor position feedback to the servo controller.
Asynchronous (Induction) AC Servo Motors: The stator, similar to synchronous types, includes a core, windings, and power leads. However, the rotor, often a squirrel cage design, has rotor core windings.
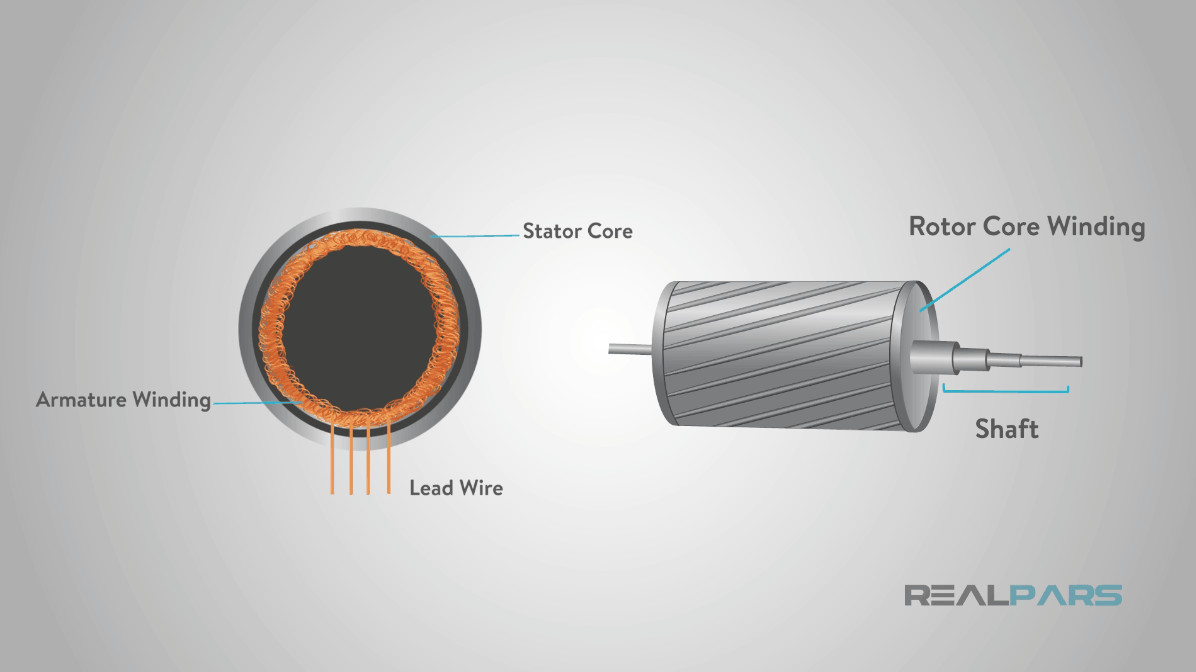 Induction Motor
Induction Motor
Only the stator winding receives AC power, creating an alternating flux field—a rotating magnetic field (RMF)—at synchronous speed. The relative motion between the stator RMF and rotor conductors induces an electromagnetic force (EMF) in the rotor, as per Faraday’s law, similar to transformer action.
 Asynchronous Servo Motor
Asynchronous Servo Motor
The induced rotor current generates its own alternating flux field, lagging behind the stator flux. The rotor rotates in the direction of the stator flux but at a slightly slower, asynchronous speed.
Servo Motor Applications: Where Precision Matters
Servo motors are essential across numerous industrial and commercial applications where precise motion control is critical:
- Robotics: Each joint of a robot arm commonly utilizes a servo motor for precise angular movement, enabling complex and coordinated actions.
- Camera Autofocus: Built-in servo motors in cameras precisely adjust lens position for sharp image focus.
- Antenna Positioning Systems: Servo motors control both azimuth and elevation axes in antenna and telescope systems, such as those used in radio astronomy observatories, ensuring accurate tracking.
- Manufacturing Machinery: Metal cutting, forming, and fabrication machines rely on servo motors for precise motion in milling, lathes, and bending processes.
- Automated Guided Vehicles (AGVs): Servo motors contribute to the controlled navigation and movement of AGVs in warehouses and factories.
- Medical Equipment: Precision medical devices, like surgical robots and diagnostic equipment, incorporate servo motors for accurate and reliable operation.
- Aerospace: Servo motors are crucial in aircraft control surfaces, flight simulators, and satellite positioning systems.
In conclusion, servo motors are indispensable components in modern technology, providing the foundation for precise and controlled motion in a vast range of applications. Their closed-loop feedback system, diverse types, and sophisticated working principles make them the driving force behind automation, robotics, and countless other precision-driven systems. We hope this exploration has provided a clear understanding of “what is a servo motor” and its significance in today’s world.
